Plane Detection
The VIVE OpenXR plane detection plugin provides the functionality to obtain defined horizontal planes (such as floors or tables) and vertical planes (such as walls).
Supported Platforms and Devices
| Platform | Headset | Supported | Plugin Version | |
| PC | PC Streaming | Focus 3/XR Elite/Focus Vision | X | |
| Pure PC | Vive Cosmos | X | ||
| Vive Pro series | X | |||
| AIO | Focus 3/XR Elite/Focus Vision | V | 2.3.0 or above | |
Specification
VIVE OpenXR Unity plugin supports Plane Detection VIVE XR PlaneDetection which depends on the OpenXR feature group.
This chapter dives into creating immersive experiences with the Plane Detection feature. We'll explore its use within the Plane Detection extensions.
Environment Settings
Go to Settings > Boundary > Mixed Reality > Reset Walls, and define the walls before using plane detection. The scripts are located in Packages VIVE OpenXR Plugin > Runtime > Toolkits > PlaneDetection.
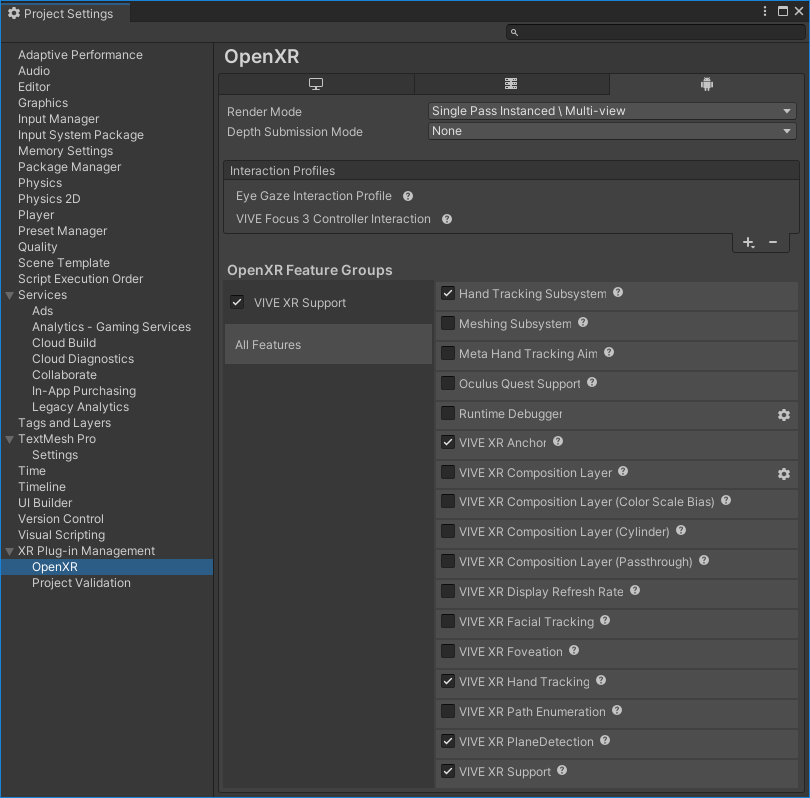
Enable the PlaneDetection feature. In Edit > Project Settings > XR Plug-in Management > OpenXR, enable the VIVE XR PlaneDetection feature.
The feature depend on HTC XR Elite v1.0.999.644 or newer ROM.
Golden Sample
The Sample at Asset > VIVE > OpenXR > > Samples > PlaneDetection.
How to use Plane Detection
You can refer to the script PlaneDetectionTestHandle.cs.
1. Check if the Plane DetectionManager supports.
if (!PlaneDetectionManager.IsSupported())
{
yield break;
}
2. Creating a Plane Detector.
var pd = PlaneDetectionManager.CreatePlaneDetector();
if (pd == null)
{
yield break;
}
3. Start detecting planes using the Plane Detector.
Check the status of the Plane Detector. If the status is "Completed", proceed to the next step. If the status is "Pending", continue waiting. If the status is anything else, stop the detection.
pd.BeginPlaneDetection();
yield return null;
var state = pd.GetPlaneDetectionState();
bool isDone = false;
time = 0;
while (isDone)
{
switch (state)
{
case VivePlaneDetection.XrPlaneDetectionStateEXT.DONE_EXT:
Debug.Log("GetAllPlanes() state: " + state);
isDone = true;
break;
case VivePlaneDetection.XrPlaneDetectionStateEXT.PENDING_EXT:
if (time + 0.5f > Time.unscaledTime)
{
time = Time.unscaledTime;
Debug.Log("GetAllPlanes() state: " + state);
}
yield return null;
continue;
case VivePlaneDetection.XrPlaneDetectionStateEXT.NONE_EXT:
case VivePlaneDetection.XrPlaneDetectionStateEXT.FATAL_EXT:
case VivePlaneDetection.XrPlaneDetectionStateEXT.ERROR_EXT:
Debug.Log("GetAllPlanes() state: " + state);
PlaneDetectionManager.DestroyPlaneDetector(pd);
detectPlaneButton.interactable = true;
yield break;
}
yield return null;
state = pd.GetPlaneDetectionState();
}
4. Get the detected plane information from the Plane Detector.
The Plane Detector Location object contains the plane's size, pose, and some raw data. Usually, only the size and pose are used. Use the planeID from Plane Detector Location to retrieve the Plane object. The Plane object contains the parsed Vertex, Index, UV, and original Vertex.
List<PlaneDetectorLocation> locations;
if (pd.GetPlaneDetections(out locations) != XrResult.XR_SUCCESS)
{
yield break;
}
foreach (var location in locations)
{
PlaneDetection.Plane plane = pd.GetPlane(location.planeId);
}
5. Finally, release resource by API DestroyPlaneDetector.
PlaneDetectionManager.DestroyPlaneDetector(pd);
See Also
Plane Detection extension.